Simulator of delivery of goods with the help of a swarm of quadcopters
Hello world!
In the industry of copters now all actively engaged in the development of hardware and software under this iron, I also wanted to start elaborating the issue of commercial use of copters with a system that can automate and scale their further use.
Therefore, the following goal is given the current performance characteristics of the quadcopters, to show the possibility or impossibility of fast delivery of cargoes with them, modelling such delivery in the large city.
For example took Moscow, and covered it with grid of charging stations\transplant in increments of 5 km.
Conditions in the world simulator, the following:
the
The quadcopter is used with the following performance characteristics:
the
In the simulator real-time flows, relative to which everything happens. Every 10 minutes, there are orders in any place of Moscow. The order represents a place where there is a hungry customer and the restaurant where he already made dinner a random mass in a given interval. After receiving the order information, the system calculates the required parameters of the itinerary, the required number of copters which stations to take them on which route they should go. After that required the copter or copter having your on-Board computer information, start the route, taking lunch and carry it to the user.
If the copter understand that the current charge is not enough to doleta to plus return to the base he flies to the nearest base in the direction of the user. At the station the copter made the order to free the copter, and he remains to be charged.
Writing all this logic, ran the simulator and began to watch. At first everything was going great and average time of delivery of the order was around 25 minutes, but then began to grow. Then suddenly one of the drones went missing in Butovo. It alarmed, turned out he crashed, as all the stations were full, and he didn't have enough charge to fly to free.
After watching this behavior, I added in the logic and even the seat reservations at the stations, and now the copter, building your route, reserving places at the stations in advance in order not to be left without a seat when the charge is close to zero.
If the weight of order is more than one can lift the copter, it performs several copters flying together, but sometimes it turns out that the fly to the user they have different intervals, but it is left as a feature.
delivery of two heavy orders two copters
After that, the next task was the reduction in the average time of delivery remains growing with time. To do this, in the logic of the added regrouping drones with overly filled with stations on empty — over time, the copters were grouped on some random stations, leaving the others empty — in the end, the average delivery time is increased. Once the logic is corrected, even after two simulator days, the delivery time was still within 30-40 minutes.

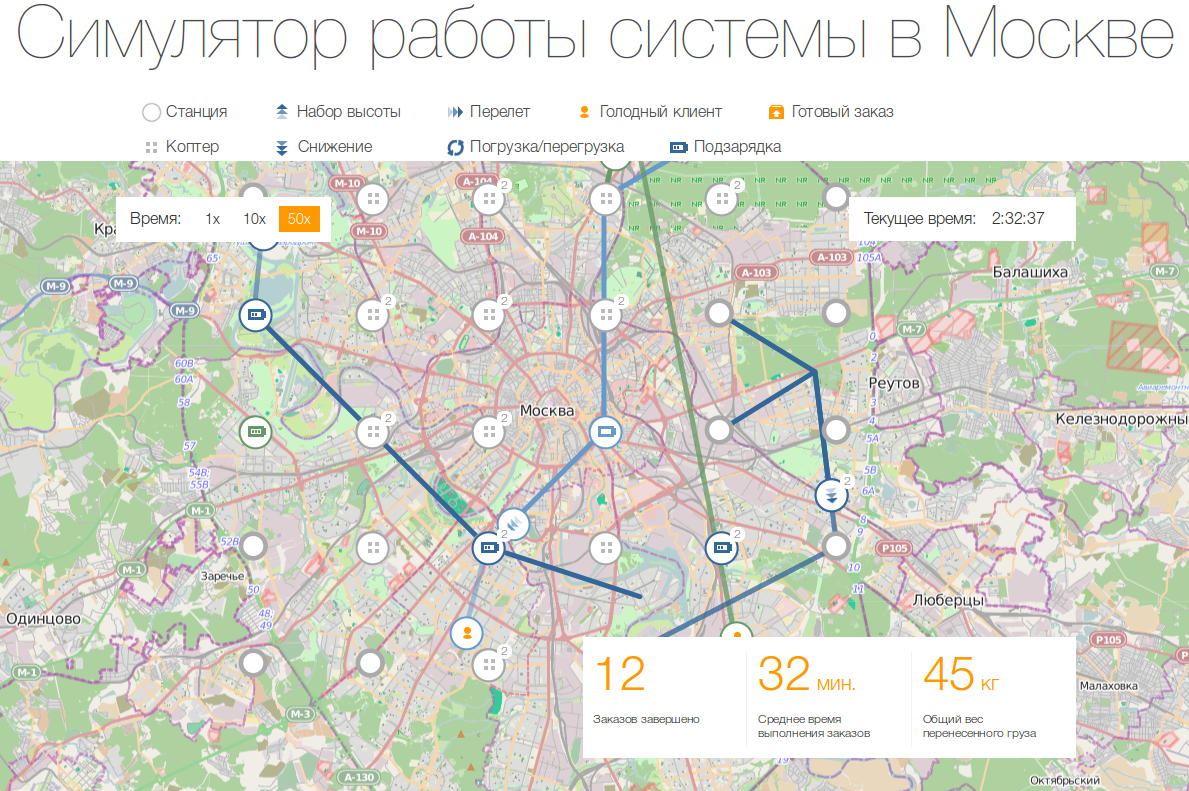
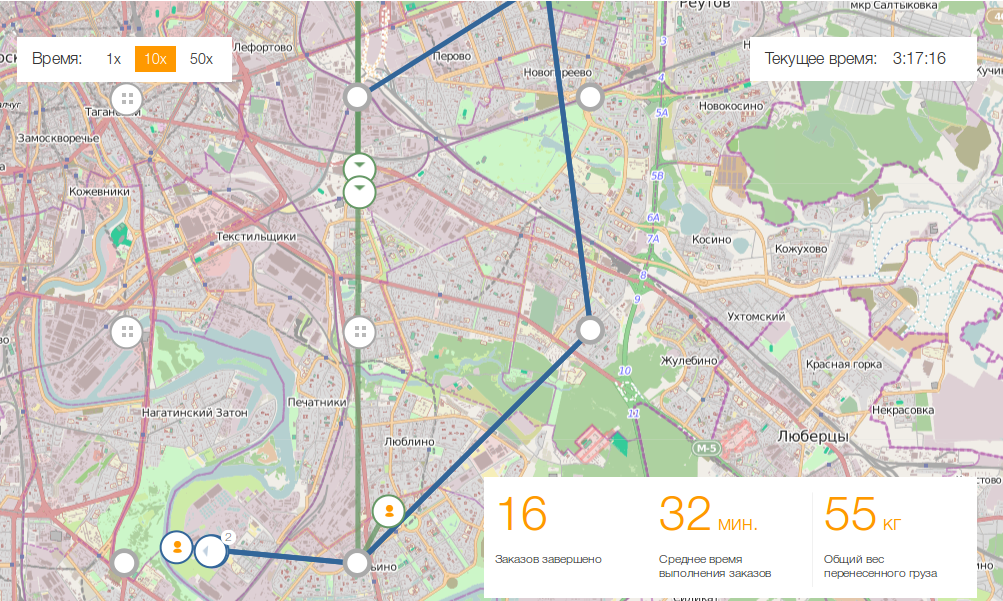
To watch the simulation live here — http://karlssonproject.com/#map
In the block of statistics shows the number of orders shipped, the average delivery time and the total mass of freight transported. Below are two plaques with detailed information on all orders and the copter showing all the changed parameters.
What's left now in the simulator:
the
Final suggestions:
Even at current copters can make the system automatic delivery of light cargo, and further by increasing the battery capacity, the characteristics of the motor-propeller group, the number of required stations will only decrease, and the throughput of the entire system to grow.
PS
In fact, this simulator is the first part of the project food delivery copter. We are now writing the software part of the project and begin to create autopilot quadcopter and are looking for interested geeks, with whom we will writeartificial intelligence the autopilot.
For more details, welcome to karlssonproject.com
Article based on information from habrahabr.ru
In the industry of copters now all actively engaged in the development of hardware and software under this iron, I also wanted to start elaborating the issue of commercial use of copters with a system that can automate and scale their further use.
Therefore, the following goal is given the current performance characteristics of the quadcopters, to show the possibility or impossibility of fast delivery of cargoes with them, modelling such delivery in the large city.
For example took Moscow, and covered it with grid of charging stations\transplant in increments of 5 km.
Conditions in the world simulator, the following:
the
-
the
- Distance between stations — 5 km
- Capacity of station — 4 camera the
- the Frequency of occurrence of the order — 10 minutes the
- the range of scales of the order of from 1 to 8 kg
the Initial distribution of copter — 2 to the station (except for the outermost stations) the
The quadcopter is used with the following performance characteristics:
the
-
the
- Speed — 16 m / c the
- Height of flight level 200 m the
- flight Time without load — 30 min. the
- flight Time with a full load in 4kg — 10 min the
- discharge Rate of the battery is linear relative to the weight of cargo the
- Time to full battery charge in 20 minutes the
- rate of Climb at lower\set — 6 m\c
In the simulator real-time flows, relative to which everything happens. Every 10 minutes, there are orders in any place of Moscow. The order represents a place where there is a hungry customer and the restaurant where he already made dinner a random mass in a given interval. After receiving the order information, the system calculates the required parameters of the itinerary, the required number of copters which stations to take them on which route they should go. After that required the copter or copter having your on-Board computer information, start the route, taking lunch and carry it to the user.
If the copter understand that the current charge is not enough to doleta to plus return to the base he flies to the nearest base in the direction of the user. At the station the copter made the order to free the copter, and he remains to be charged.
Writing all this logic, ran the simulator and began to watch. At first everything was going great and average time of delivery of the order was around 25 minutes, but then began to grow. Then suddenly one of the drones went missing in Butovo. It alarmed, turned out he crashed, as all the stations were full, and he didn't have enough charge to fly to free.
After watching this behavior, I added in the logic and even the seat reservations at the stations, and now the copter, building your route, reserving places at the stations in advance in order not to be left without a seat when the charge is close to zero.
If the weight of order is more than one can lift the copter, it performs several copters flying together, but sometimes it turns out that the fly to the user they have different intervals, but it is left as a feature.
delivery of two heavy orders two copters
After that, the next task was the reduction in the average time of delivery remains growing with time. To do this, in the logic of the added regrouping drones with overly filled with stations on empty — over time, the copters were grouped on some random stations, leaving the others empty — in the end, the average delivery time is increased. Once the logic is corrected, even after two simulator days, the delivery time was still within 30-40 minutes.
To watch the simulation live here — http://karlssonproject.com/#map
In the block of statistics shows the number of orders shipped, the average delivery time and the total mass of freight transported. Below are two plaques with detailed information on all orders and the copter showing all the changed parameters.
What's left now in the simulator:
the
-
the
- Weather conditions — the wind is always calm. No hurricanes and heavy rains. After some time we will add, coming from the South-West of the wind rose in Moscow. the
- danger zone — in the real world in the memory of the kopter will be dangerous point with the given radius, where it is not necessary to fly a simulator, they all fly directly the
- tallest building — is now set to constant the height of the line to 200 m, but in reality the copter will use a map of buildings with Google and fly just above the roofs of all the buildings on the route. This will save the charge on the climb at 200 meters, where enough 50, or, on the contrary, to rise above the city, the Metropolis or the Ostankino tower.
Final suggestions:
Even at current copters can make the system automatic delivery of light cargo, and further by increasing the battery capacity, the characteristics of the motor-propeller group, the number of required stations will only decrease, and the throughput of the entire system to grow.
PS
In fact, this simulator is the first part of the project food delivery copter. We are now writing the software part of the project and begin to create autopilot quadcopter and are looking for interested geeks, with whom we will write
For more details, welcome to karlssonproject.com



Комментарии
Отправить комментарий